کلیاتی درباره سرو موتور و انواع آن
مقدمه:
ماشین های الکتریکی بزرگ اعم از DC و AC عمدتا برای تبدیل انرژی پیوسته مورد استفاده قرار می گیرند، اما در برخی از کاربرد های خاص به تبدیل انرژی پیوسته نیاز نیست برای مثال می توان از حرکت بازو های رباتیک یاد کرد. در این کاربرد هدف تغییر مکان بازو از وضعیتی خاص به وضعیت دیگر است. در کاربرد هایی که تبدیل انرژی پیوسته مد نظر نباشد از ماشین های مخصوص که عمدتا در حالت موتوری مورد بهره برداری قرار میگیرند استفاده می شود. اصول مربوط به این ماشین ها شبیه ماشین های الکتریکی عادی است اما نحوه ساخت، طراحی و بهره برداری از آنها با ماشین های عادی فرق دارد.
همان گونه که می دانیم شافت ( محور ) خروجی موتورهای DC قادر نیست تا در یک موقعیت زاویه ای خاص قرار گیرد یعنی نمی توان شافت یک موتور DCرا تا زاویه دلخواه به چرخش در آورد. شافت موتورهای پله ای را نیز نمی توان روی زاویه خاصی تنظیم نمود. برای مثال می توانیم به موتور پله ای دستور دهیم که 5 درجه به سمت راست یا 10 درجه به سمت چپ بچرخد، اما نمی توانیم به آن بگوییم شافت خود را در موقعیت 35 درجه قرار دهد زیرا موتور پله ای دارای سیستم فیدبک نمی باشد و لذا موقعیت شافت آن برای موتور قابل اندازه گیری نیست. برای این منظور از نوع خاصی از موتورها که به سرو موتور ها مشهورند باید استفاده کرد.
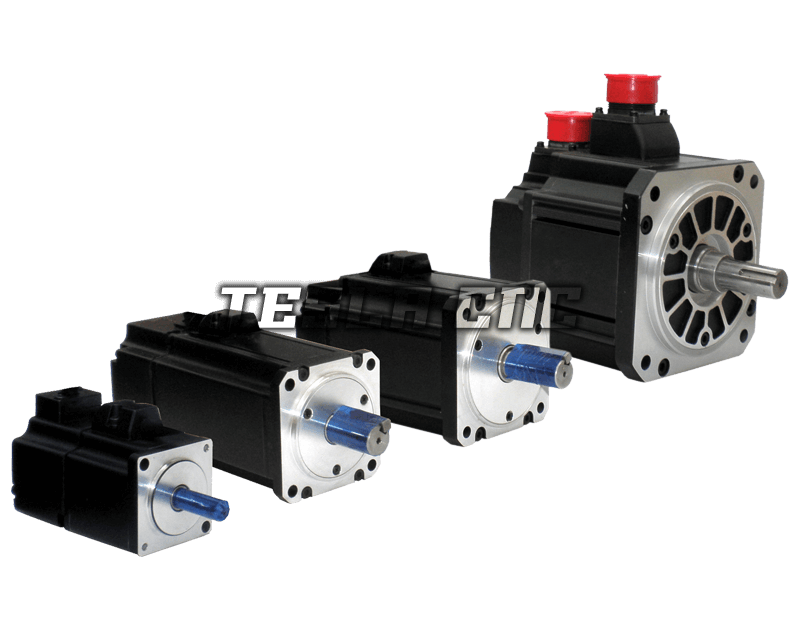
سروو موتور نوعی موتور است که شافت ( محور ) خروجی آن قادر است تا در یک موقعیت زاویه ای خاص قرار گیرد یعنی می توان شافت یک سروو موتور را تا زاویه دلخواه به چرخش در آورد. سرو موتور که گاهی به نام موتور کنترل از آن یاد می شود به گونه ای طراحی و ساخته می شود که بتوان از آنها در سیستم های کنترل و فیدبک استفاده نمود، توان اسمی این موتور ها بین چند دهم وات تا چند صد وات می باشد.
سرعت پاسخ این موتور ها بسیار زیاد است و لذا باید اینرسی(لختی) آنها کم باشد. در نتیجه قطر این ماشین ها کم بوده، ولی طول آنها نسبتا زیاد است از این موتور ها در سیستم های رادار، ربات ها، کامپیوتر و ماشین های افزار استفاده می شود.
سرو موتور:
کلمه سرو Servo از لغت یونانی Servant گرفته شده به معنای اینکه مانند یک خدمتگزار مطیع دستورات بوده و آنها را با دقت و سرعت انجام می دهد. سرو موتور یک نوع موتور الکتریکی بوده که به دلیل استفاده در پروژه های صنعتی به صورت حلقه بسته، مجهز به سیستم های کنترل فیدبک شده است، که متغییر کنترل شونده موقعیت، سرعت، گشتاور می باشد. لختی در این موتور ها بسیار پایین بوده و در نتیجه تغییر سرعت در این نوع موتورها بسیار سریع می باشد. به عبارت دیگر سرو موتور ها نوع پیشرفته موتور ها است که در توانهای بالا و در مواردی که به موقعیت و سرعت دقیق نیاز هست استفاده می شود. این موتورها در واقع نوعی از موتورهای DC معمولی می باشند که توسط مدارات کنترلی، حرکت مداوم دورانی موتور را به حرکت محدود ۱۸۰ درجه تبدیل کرده و نیز این قابلیت را به موتور DC می دهند که بتوان آن را در یک نقطه خاص قفل کرد.

در اینگونه موتورها بر اساس باری که قرار است موتور تحمل کند و همچنین طول بازوی قرار گرفته بر روی شفت موتور و همچنین گشتاور مورد نیاز، موتور DC معمولی یا گیر بکس دار استفاده کرد. اولین سیستم های الکتریکی سرو نیز با نام سرو موتور های DC پا به عرصه دنیای صنعتی گذاشت، صرف نظر از اشکالات ذاتی موتورهای DC مانند ساختار پیچیده (به خصوص در ماشین ها DC با جبران سازی کامل)، راندمان پایین تر نسبت به ماشین های AC و همچنین قیمت بالا و هزینه تعمیرات و نگهداری زیاد (ماشین های DC به دلیل جاروبکهای کربنی نیازمند نگهداری و بازدیدهای دوره ای می باشند) و به دلیل کموتاتور های مکانیکی قابلیت اطمینان در این ماشینهای نیز کاهش چشمگیری می یابد و امکان یکسو سازی جریان های بزرگ را ندارد.
اساس کار بدین صورت است که با متصل کردن شفت موتور به یک پتانسیومتر یا هر سنسور که بتواند مقدار چرخش شفت را اندازه گیری کند و با استفاده از یک فیدبک منفی و اعمال دوباره آن به موتور، میتوان موتور را در یک وضعیت خاص نگه داشت .
این مدارات کنترلی یا بصورت از قبل طراحی شده در داخل ساختمان موتور قرار دارد و یا اینکه توسط کاربر و با توجه به نیاز، طراحی شده و به یک موتور DC مناسب از لحاظ مکانیکی متصل می شود لازم بذکر است که در ساختمان بعضی از سرو موتورها از میکروکنترل های خاص استفاده شده که به اینگونه سرو موتورها، سرو موتورهای دیجیتال گفته میشود. این گونه سرو موتورها بر خلاف سرو موتورهای معمولی یا آنالوگ با اختلاف ولتاژ کنترل نمیشوند و کنترل آنها با استفاده از یک پالس مربعی که فرکانس آن با توجه به محل قرار گیری موتور تغییر خواهد کرد کنترل می شوند .
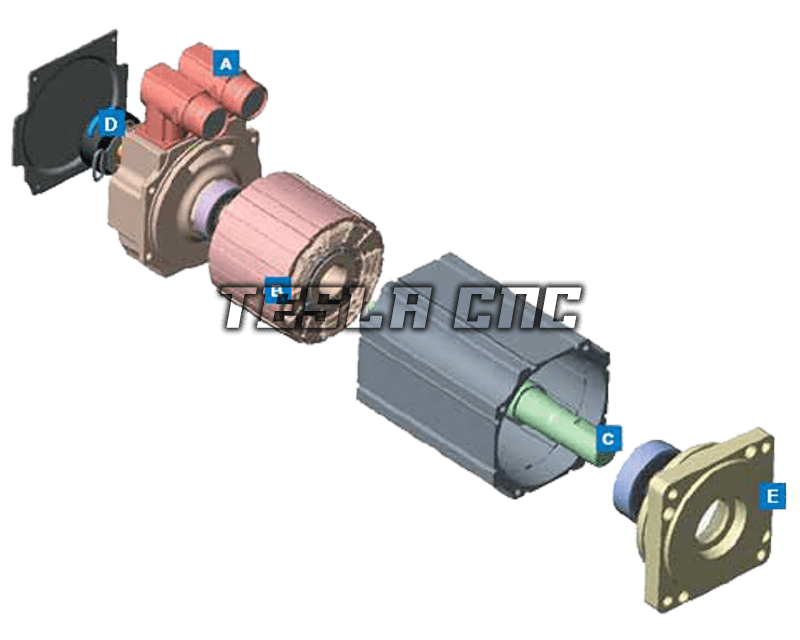
اجزاء سرو موتور:
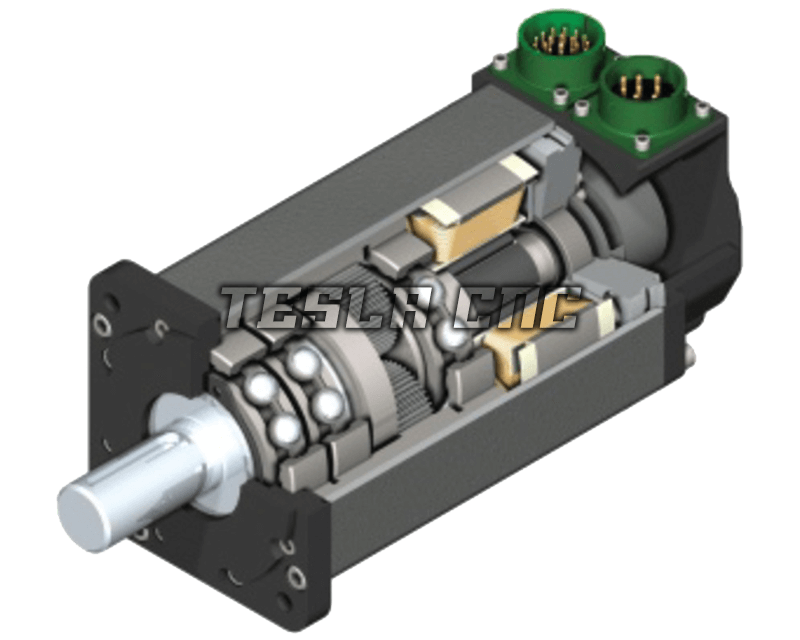
برای اینکه به طور کامل درک کنید سرو موتور چگونه کار می کند، نیاز است که نگاهی به داخل موتور بیاندازید. به طور کلی سرو موتورها متشکل از: پتانسیومتر، یک موتور DC، و یک مدار کنترل هستند. این موتور توسط چرخ دنده به چرخ کنترل وصل شده است. همانطور که موتور می چرخد، مقاومت پتانسیومتر تغییر می کند، بنابراین مدار کنترل می تواند با دقت درست تنظیم کند که چقدر جنبش وجود دارد و در کدام جهت است.
سرو موتور یک محور خروجی دارد که این محور قادر است تا در یک موقعیت و زاویه ای خاص با ارسال سیگنال قرار گیرد. در واقع چگونگی حرکت و موقعیت های زاویه ای این محور خروجی توسط دسته ای از سیگنال ها که برای سیم کنترل آن تعریف می شود کنترل می شود. برای طول مدت زمانیکه یک سیگنال فعال بوده و یک پالس بر روی خط ورودی آن قرار دارد این محور خروجی در موقعیت خاص زاویه ای که مختص آن سیگنال است قرار می گیرد و با تغییر سیگنال موقعیت زاویه ای تغییر می کند
مدار داخل سروو، کنترل موتور را به این صورت انجام میدهد:
یک پتانسیومتر متصل به محور خروجی سرو موتور، زاویه فعلی موتور را اندازه گیری کرده و این ولتاژ با آن چیزی که برای سروو به عنوان زاویه مقصد مشخص شده مقایسه می شود. بر اساس نتیجه مقایسه موتور در جهتی به حرکت در میآید که اختلاف زاویه را از بین ببرد. به زبان ساده تر، شما به موتور یک زاویه مقصد می دهید و محور موتور به آن زاویه میرسد.
یک نکته: محور خروجی اکثر سروو ها نمیتوانند دور کامل بزنند بلکه فقط یک بازه ۲۷۰ درجه ای یا ۱۸۰ درجهای دارند.
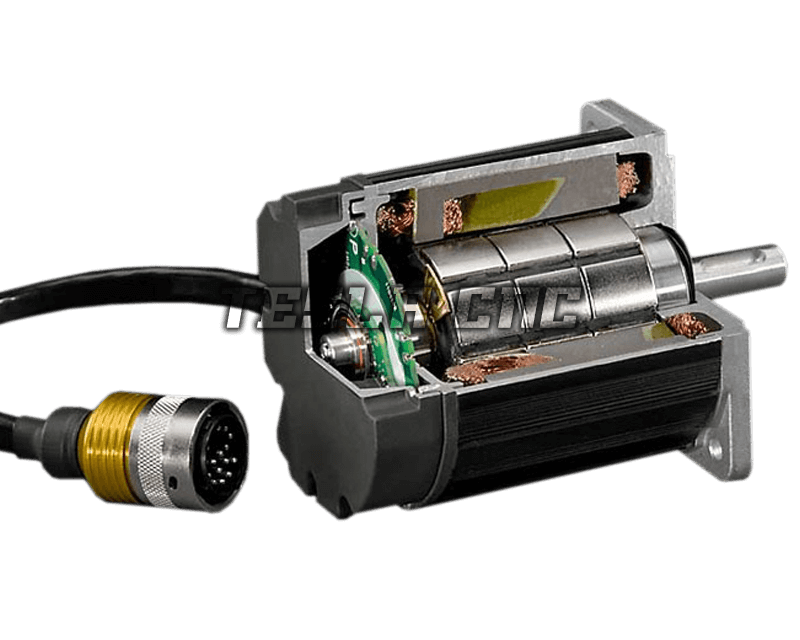
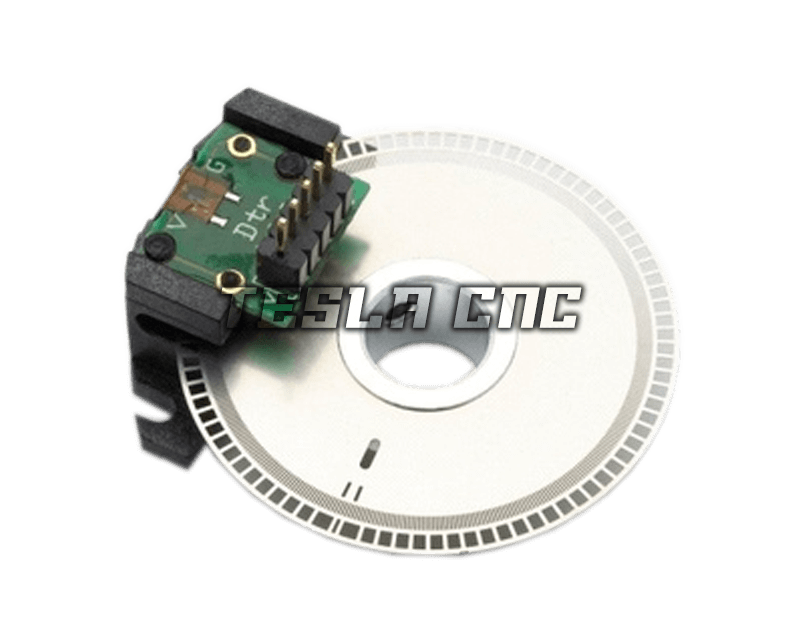
انکودر:

در سرو موتور های صنعتی برای گرفتن فیدبک و یا بازخورد از حرکت موتور عموما از انکودر استفاده میشود که انکدر از داخل به شفت موتور متصل شده اند.
معمولا مدلهای انکودرهای استفاده شده در سروو موتور ها میتواند :
الف: دیجیتال (optical)
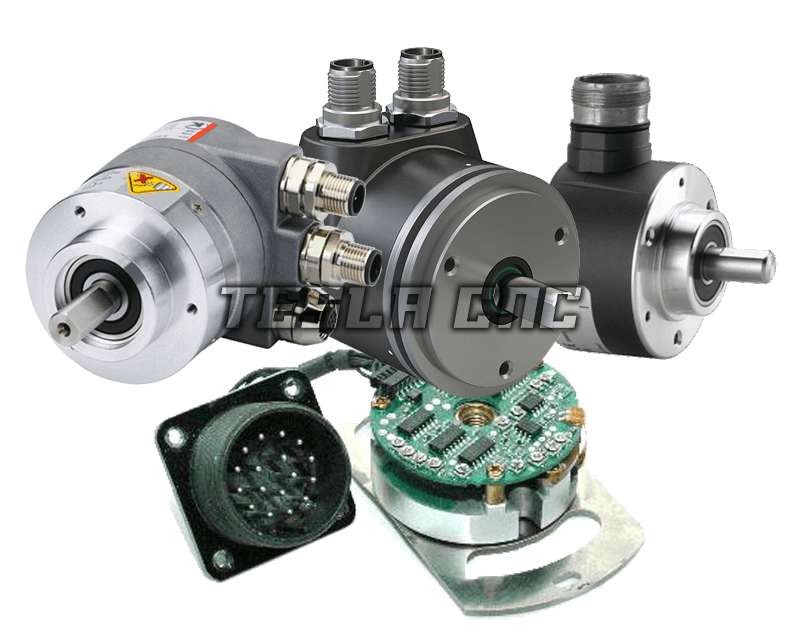
۱- انکودرهای پارالل و یا Incremental
۲- انکودرهای سریال افزایشی (Incremental)، مطلق ۱ دور یا (Absolute Single Turn)، مطلق چند دور یا (Absolute Multi Turn).
ب: انکودر های آنالوگ:

- انکودر های سینوسی و کسیونوسی ().
عملکرد مداری
هر servo از چند مدار الکترونیکی کنترلی، یک مقاومت متغیر (پتانسیو متر)، تعدادی چرخدنده (برای ایجاد امکان حرکت) و یک shaft خروجی تشکیل شده است. در بخشی از این مدار که به آنpot اطلاق می شود، امکان دیدن سیگنالی که موتور تحت تاثیر آن از خود عکس العمل نشان می دهد وجود دارد. مدار درون سرو موتور کنترل موتور را به صورت زیر انجام می دهد:
یک پتانسیومتر متصل به محور خروجی سروو زاویه فعلی موتور را اندازه گیری می نماید و این ولتاژ با آن ولتاژی که برای سروو به عنوان زاویه مقصد مشخص شده است مقایسه می شود. بر اساس نتیجه مقایسه موتور در جهتی به حرکت در می آید که اختلاف زاویه را از بین ببرد.
کنترل سرو موتور
سیستم سروو را نمی توان تنها عنصری دانست که کارش کنترل سرعت و یا موقعیت تجهیزات مکانیکی است. علاوه بر عناصر ساده مکانیکی سیستم سروو هم اکنون به یک کنترل کننده اصلی برای موقعیت یابی و کنترل سرعت تبدیل شده است. سیستم سرو موتور پالس هایی مثبت را با مقادیر قابل توجهی از این پالس ها ارسال می نماید که این پالس ها را در اصطلاح پالس فرمان می گویند.
برای کنترل بهینه سیستم های تولید و ماشین آلات صنعتی گوناگون که شامل بهینه سازی در مصرف انرژی، وقت و هزینه های مختلف فراینده تولید، ماشین ابزارها و غیره می شود، از حالتهای کنترلی به شرح زیر استفاده می شود:
۱- کنترل موقعیت
۲- کنترل سرعت
۳- کنترل گشتاور
۴- کنترل دستی
انواع سرو موتور:
سرو موتورها انواع مختلفی دارند و بنا بر نوع دسته بندی آنها تعداد متنوعی از سرو سیستم ها را می توان نام برد. اگر نوع خروجی مد نظر باشد سروهای کنترل سرعت و کنترل مکان را میتوان نام برد. اگر نوع فرامین ورودی تعیین کننده باشد می توان از سروهای کنترل شده با سطح ولتاژ یا عرض پالس و یا تعداد پالس نام برد. باید توجه داشت فراخور نیاز میتوان هر سرویی طراحی کرد ولی برای پایین آمدن هزینه و مچینگ بهتر سیستم و نیز میتننس بهتر و آموزش پذیری بهتر و دلایلی دیگر از سرو موتورهای استاندارد استفاده می شود.
به طور کلی دو نوع سرو موتور وجود دارد AC و DC، سرو موتورهای AC بیشتر برای سرعت بالا مناسب است و همچنین زمان پاسخگویی سریعتر و دارای کنترل شتاب و کاهش آن است و در ماشین آلات صنعتی مورد استفاده قرار می گیرد.
سرو موتورهای DC برای سرعت های بالا طراحی نشده و معمولا برای برنامه های کاربردی کوچک مناسب است. به طور کلی، موتور DC ارزانتر از همتای خود AC است.
سرو موتور های DC:

سرو موتور های DC در حقیقت یک موتور DC با تحریک جداگانه یا موتور DC با قطب های آهنربای دائم است. اصول اصلی عملکرد این سرو موتور شبیه موتور های DC معمولی است. سرو موتور های DC عمدتا توسط ولتاژ آرمیچر کنترل می شوند آرمیچر در این موتور ها طوری طراحی می شود که دارای مقاومت زیاد باشد، لذا مشخصه های گشتاور-سرعت این موتور ها خطی بوده و شیب منفی نسبتا زیادی دارند. باید دانست در ماشین های DC نیرو محرکه مغناطیسی (MMF) آرمیچر و mmf مدار تحریک متعامدند، لذا تغییرات پله ای در ولتاژ آرمیچر (جریان ) باعث می گردد در موقعیت یا سرعت رتور تغییر سریع حاصل شود.
سروموتور های AC:
توان اسمی سرو موتور های DC از چند وات تا چند صد وات می باشد. در حقیقت سرو موتور های اسمی بالا از نوع DC هستند امروزه در توان های کم از سرو موتور های AC استفاده می شود. سرو موتور های AC مقاوم تر بوده و اینرسی (لختی) آنها نیز کم است اما باید متذکر شد که سرو موتور های AC غیر خطی هستند و مشخصه های گشتاور-سرعت آنها به خوبی و ایده الی سرو موتور های DC نمی باشد. گفتنی است که گشتاور سرو موتور های AC از گشتاور سرو موتور های DC با توان مشابه کمتر است.
اکثرا سرو موتور های AC که در سیستم های کنترل مورد استفاده قرار می گیرند از نوع موتور های القایی دو فاز با رتور قفس سنجابی می باشد. در این موتور ها استاتور حاوی دو سیم پیچی است که در طول محیط استاتور درون شیار ها توزیع و گسترده شده اند این دوسیم پیچی به قرار زیر تشریح می شوند. سیم پیچ اول، که به سیم پیچ مرجع یا سیم پیچ فاز ثابت معروف است و منبع ولتاژ ثابت متصل می باشد. سیم پیچی دوم، که به سیم پیچ کنترل فاز موسوم می باشد به منبع ولتاژ متغییر Va متصل می شود.
در این موتور ها:
الف- محور های مغناطیسی دو سیم پیچ فوق الذکر بر هم عمود اند.
ب- زاویه ولتاژ متغییر Va هموار +-90 درجه است.
ج-ولتاژ سیم پیچ کنترل فاز (va) عمدتا توسط خروجی یک تقویت کننده به نام سرو مهیا شده و به موتور اعمال می گردد.
د-جهت چرخش موتور به اختلاف فاز vm و va بستگی دارد و پس فاز و یا پیش فاز بودن Va نسبت به Vm جهت چرخش موتور را عوض می کند .
سرو موتور های AC سه فاز:
در مواقعی که به توان زیاد نیاز داریم از سرو موتور DC استفاده می شود. اما امروز تحقیقات دامنه داری در حال اجراست تا بتوان از موتور های قفس سنجابی سه فاز با توان بالا به عنوان سرو موتور در سیستم های کنترل استفاده نمود.
کاربرد های سرو موتور:
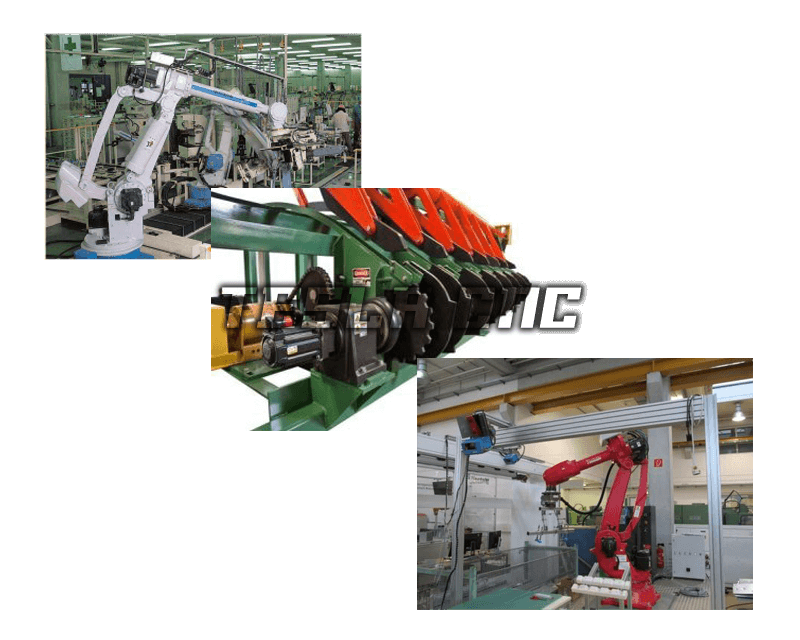
از سرو موتور در تمام پروسه های کنترلی و عمومی که نیاز به موتور الکتریکی می باشد می توان استفاده کرد، ولی به دلیل قیمت بالای این موتورها از لحاظ اقتصادی به صرفه نمی باشد تا از آنها استفاده نمود. ولی در بعضی پروسه ها باید فقط و فقط از سرو موتور استفاده کرد زیرا دقت بسیار بالا، سرعت و عکس العمل سریع، گشتاور متغییر و بالا نسبت به سایر موتورهای دیگر را دارد. سرو موتورها در محدوه کسری از کیلووات تا صدها کیلو وات مورد استفاده قرار می گیرند، سرو موتور های با توان های پایین اغلب در اتومبیل ها، ماشینهای ابزار و انواع مختلف شیرهای کنترلی استفاده می شود در حالی که سرو موتورهای با توان بالاتر در ماشینهای نورد کاغذ، بالابرها، آسانسورها، ماشینهای تعلیق جرثقیل ها و… مورد استفاده قرار می گیرند. سرو موتور های با توان کمتر از یک کیلو وات برای ماشین های خاص استفاده می شوند، البته ناگفته نماند که استپر موتورها و موتور های خطی نیز جزو موتور های سرو محسوب می شوند.
در ماشین آلات تولید قطعات الکترونیکی، انواع ماشین آلات cncفلزات، ماشین آلات cncطلا و چوب، ماشین آلات بسته بندی و دوخت پلاستیک، ماشین آلات نساجی، انواع ماشین آلات چاپ، انواع روبات های صنعتی، روبات های تجهیزات پزشکی، شبیه ساز خودرو، سینمای ۵ بعدی و ۳ بعدی، ماشین آلات تزریق پلاستیک و … نیز از سرو موتورها استفاده می شود. همچنین از دیگر کاربرد های سرو موتور ها می توان به سیستم کنترل سطح آب در مخازن کولرهای آبی، سیستم ریلی بکار رفته در پرینتر ها، سیستم کورس کنترل در اتومبیل، بازوهای صنعتی، سیستم فوکوس خودکار در دوربین ها، سیستم فن های خنک کننده با دور متغییر، اکچوایتورها در هواپیما برای کنترل فلپ ها، سیستم کنترل سرعت موتور های الکتریکی زیر بار و… اشاره نمود.
در تمامی سیستمهای فوق سیستم دائما در حال نمونه گیری از خروجی و جبران سازی احتمالی آن میباشد تا مطلوب که همان کمیت نظیر درخواست ورودی می باشد حاصل شود.
مزایای سرو موتورها:
از جمله مزایای سرو موتورها می توان به: دقت بالا، سرعت انتقال بالای پالس، کاهش نویز شنیداری، دینامیک بالا، هوشمند بودن، کاهش حجم ماشین، کاهش تلفات و حرارت ماشین، امکان کنترل گشتاور و سرعت به صورت همزمان از صفر تا ۱٫۵ برابر مقدار نامی، کاهش مصرف انرژی، افزایش قابلیت اطمینان سیستم کنترلی اشاره کرد. لازم به ذکر است که بیشتر سیستم های سروی موجود در بازار جهانی از نوع سیستم های سروی AC می باشند.
مزایای سروموتور AC نسبت به سروموتور DC:
سرو موتورهای AC همانطـور که قبلا ذکر شد انتخاب مناسبی برای کاربـــردهای با توان پایین هستند و به همین دلیل است که موتورهای AC همیشه به موتورهایDC ترجیح داده میشوند. مزایای سرو موتورهای AC به سرو موتورهایDC شامل موارد زیر است :
۱- روتورهای قفس سنجابی ساده هستند و در مقایسه با سیم پیچی آرمیچر ماشین های DC از نظر ساختاری، محکمتر هستند.
۲- سرو موتورهایAC دارای جاروبک برای کموتاسیـون نیستنـد و نیاز به تعمیر ونگهداری دائم ندارند.
۳- هیچ عایقی در اطراف هادی آرمیچر آنچنان که در موتورDC وجود دارد نیست پـس آرمیـچر می تواند بسیار بهتر گرما را پخش کند.
۴- بدلیل اینکه آرمیـچر، سیـم پیچی های عایـق دار پیچـیده ای ندارد ، قطر آن می توانـد برای کاهش اینرسی روتور بسیار کاهش یابد. این امر به جلوگیری از Over Shoot در مکـانیسم سـرو کمک می کند. یک سرو موتور AC اصولا یک موتور دو فاز القایی است به جز در مورد جنبههای خـاص طراحی آن.
توان مکانیکی خروجی یک سرو موتورAC از ۲ وات تا چند صد وات تغییر می کند. مــوتور های بزرگتر از این توان بسیار کم بازده اند و اگر با مشـخصات گشتـاور - سرعت مطلوب ساخته شده باشند برای استفاده در کاربردهای سرو بسیار مشکل ساز خواهند شد. سرو موتورهای دقیق در کامپیوترها ابزارهای سرو و شماری از کاربردها که به دقت بالایی نیاز است بکار می روند.

به دلیل دارا بودن مشخصه های بسیار مناسب در ماشینهای AC مانند: راندمان بالا، گشتاور مناسب و نرم که مهمترین عامل رقابت بین ماشین های AC و DC می باشد، ماشینهای DC کم کم جای خود را به ماشین های AC دادند و به تبع آن، سرو موتور های AC نیز جایگزین سرو موتورهای DCشدند، هرچند هنوز هم از سرو موتور های DCدر برخی موارد محدود استفاده می شود.
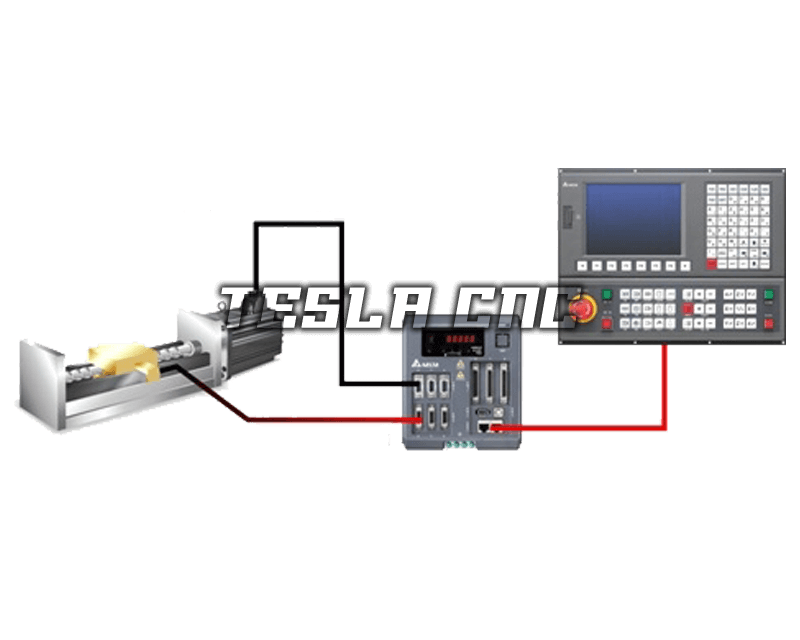
طریقه راه اندازی سرو موتور

جهت راه اندازی موتور های سروو باید از درایور آنها که به سرو درایو معروف هستند استفاده نمود. سرو درایو یا به صورت تکفاز و یا به صورت ۳ فاز ارائه می شوند، سرو درایو دارای مزایای زیر میباشد:
۱- ورودی تکفاز و خروجی ۳ فاز
۲- پشتیبانی و خواندن تمامی انکودرهای موجود در بازار
۳- قابلیت شبکه شدن درایو ها با چندین درایو و یا کنترلر دیگر از طریق شبکه Modbus ,Can, Field Bus
۴- حذف لرزش بار در سرعت های بالا و کارهای دقیق با فانکشن های تخصصی
۵- پاسخ زمانی بسیار بالا
۶- ایجاد سرعت ثابت در دور های بسیار پایین
۷- داشتن گیربکس الکترونیکی داینامیک و امکان تغییر مقادیر به صورت آنلاین
۸- تحمل اضافه بار تا ۳۰۰%
۹- داشتن ارتباط همزمان از طریق ۲ شبکه ارتباطی برای کاربردهای حرفه ای
۱۰- ایجاد homingبر روی درایو با تعیین آفست موقعیت پس از پالس
11- ایجاد مدهای کنترل speed, position, torque و قابلیت تغییر مد به صورت داینامیک
۱۲- دقت بسیار بالا